英伟达把机器人安全做成了全栈:Halos for Robotics 发布

英伟达今日发布 Halos for Robotics,号称业界首个把 AI 算力、系统软件、传感器、安全应用和认证流程整合在一起的全栈物理 AI 安全系统。Agility Robotics 成为首发客户。
英伟达把机器人安全做成了全栈:Halos for Robotics 发布
6 月 22 日,英伟达在今天正式推出 NVIDIA Halos for Robotics,对外的口径是"业界首个全栈物理 AI 安全系统"。一句话概括这件事:把 AI 算力、系统软件、传感器接入、安全应用和第三方认证准备这五件原本分散在不同供应商手里的事,捏成了一套统一架构,给机器人和物理 AI 厂商打包提供。
人形机器人公司 Agility Robotics 是首批吃螃蟹的客户,准备把 Halos 的能力融入自己的专有安全系统,用在工厂、仓库和物流场景的工业人形机器人上。
这不是一个简单的 SDK 发布。Halos for Robotics 真正想解决的是过去两年人形机器人和具身智能行业最尴尬的那个问题——Demo 跑得飞起,但真要进工厂、跟人混编作业,怎么过安全认证?没人能给一个完整答案。
为什么现在做这件事
时间点其实选得很微妙。2025 年到 2026 年这一年多,人形机器人从 Demo 视频满天飞的阶段,开始真正往落地推进。Figure、Agility、Apptronik、优必选、宇树这些公司都在做工业试点,问题是试点归试点,规模化部署立刻撞上两堵墙:
- 第一堵墙是安全标准。ISO 10218(工业机器人)、ISO 13482(个人护理机器人)、IEC 61508(功能安全)这些标准最初是为传统工业机器人和有限自动化场景写的,对依赖大模型决策、行为不完全可预测的具身智能系统并不友好。
- 第二堵墙是责任划分。芯片厂商管硅片,操作系统厂商管 OS,机器人公司管本体,集成商管现场,认证机构看到这么一个堆叠就头大——没人能对整条链路签字。
英伟达这次做的事,本质上是把自己从"卖 Jetson 和 Isaac SDK 的算力供应商"升级成"安全架构定义者"。这是一次相当典型的英伟达式打法——先把生态卡位拿到,再让合作伙伴顺着它的标准跑。
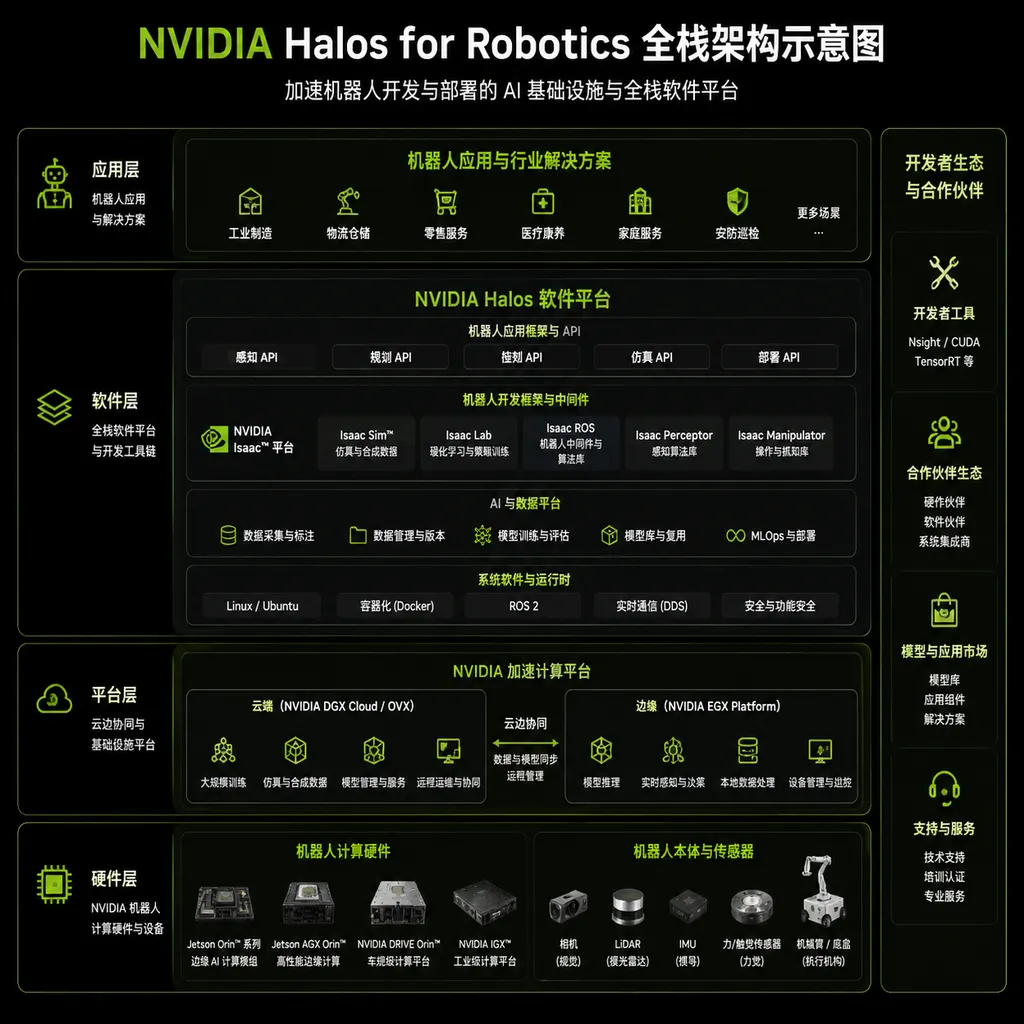
三层架构拆开看
Halos for Robotics 主要由三部分组成,对应硬件、软件、认证三个层面。
硬件层:IGX Thor + Holoscan Sensor Bridge
硬件层的核心是 NVIDIA IGX Thor。Thor 这个芯片此前主要的宣传场景是自动驾驶,现在把工业级安全机制版本拉到机器人侧——意味着原本就有的 ASIL-D 级别功能安全设计可以直接复用。
配套的 Holoscan Sensor Bridge 负责传感器接入。简单说,机器人身上一堆激光雷达、深度相机、力矩传感器、IMU,过去要靠机器人厂商自己写一堆驱动和时间同步代码,Holoscan 把这层抽象掉,给你一个低延迟、确定性时序的接入通道。
对开发者来说,这层最大的意义是:实时控制和 AI 推理可以跑在同一颗 SoC 上,而不用再像过去那样搞一颗 MCU 做安全控制、一颗 GPU 做 AI 推理,再用 CAN 总线连起来。少一层连接,就少一层认证麻烦。
软件层:Halos OS
软件层是 Halos OS,里面有两个关键组件:
- Halos Core:负责跟安全有关的运行功能,提供给注册开发者早期访问,支持两种配置——纯 Linux 配置,以及 Linux + QNX OS for Safety 8.0 双系统配置。后者明显是给那些需要严格功能安全认证的工业场景准备的,QNX 这块招牌在汽车和医疗设备里背书足够硬。
- 外部感知安全蓝图(External Perception Safety Blueprint):这是个有意思的设计。机器人自身的传感器永远有盲区,蓝图允许外部摄像头和 AI 智能体作为补充感知源,根据工厂现场的变化动态调整机器人行为。换句话说,机器人不再是"一个孤立的智能体",而是和厂房环境的监控系统协同。这套蓝图已经开源到 GitHub 上提供早期访问。
这种"机器人 + 环境感知"的协同思路其实跟自动驾驶里的 V2X 是一个味道——单车智能再强也有上限,加上路侧感知后整体安全余量直接拉一档。
认证层:Halos AI 系统检验实验室
这一层是英伟达这次发布里最容易被忽略、但其实最关键的一块。
NVIDIA Halos AI Systems Inspection Lab 是全球首个同时获得美国国家标准学会国家认可委员会(ANAB)认可、覆盖物理 AI 功能安全和 AI 安全的实验室项目。它的作用不是直接发证,而是帮合作伙伴为 TÜV 莱茵、UL Solutions、TÜV 南德、exida、SGS、CertX 这些第三方机构的认证做准备。
说人话就是:以前你做完一个机器人,拿去 TÜV 走认证,对方要看你整套系统的安全证据链,你得自己组织、自己解释、被打回来再改。现在英伟达说,你按我这套架构走,认证证据我帮你预处理好,过审快得多。
对中小机器人公司来说这是真金白银的省钱——一次工业级功能安全认证的成本和周期,足以拖垮一家创业公司一年的现金流。
跟竞品比怎么样
横向看一下市场上的对手。
传统工业机器人厂商比如 ABB、库卡、发那科,安全系统是自己一家一家做的,封闭、贵、不开放给第三方机器人开发者。
ROS 2 + micro-ROS 这条开源路线有 SROS2 提供安全机制,但功能安全认证这块还是要靠机器人公司自己跟认证机构对接,没有一个统一的"打包方案"。
英特尔之前也推过 Edge AI 安全相关的方案,但缺一颗对应的工业级 AI SoC 撑场。
英伟达这次的杀手锏在于:它同时握着 SoC(IGX Thor)、操作系统合作伙伴(QNX)、AI 框架(Isaac、Holoscan)、传感器抽象层、安全运行时和实验室预认证。整条链路一个供应商签字,这事在工业自动化历史上几乎没人做到过。
当然代价也很清楚——你会被绑死在 NVIDIA 栈上。但对很多想 18 个月内把人形机器人送进工厂的初创公司来说,这个代价值得付。
Agility 为什么是首发客户
Agility 这家公司的 Digit 机器人去年开始在亚马逊和 GXO 的仓库里跑试点,是少数真正进了商业运营场景的人形机器人之一。它的痛点非常具体:仓库里有大量人类工人混编作业,机器人一旦撞到人或者搬错东西,责任谁担?
首发 Halos 对 Agility 来说,相当于把"我们自己的安全体系"升级成"我们的安全体系 + NVIDIA 背书 + 第三方认证预备"。这套组合拳对它接下来从亚马逊的小规模试点扩展到更大规模部署有直接帮助。
开发者怎么上手
目前面向 NVIDIA IGX 的 Halos Core 已经向注册开发者提供早期访问,支持两种配置:
- Linux 单系统
- Linux + QNX OS for Safety 8.0 双系统
外部感知安全蓝图作为 Halos OS 应用层的一部分,已经在 GitHub 上开放早期访问,开发者可以直接拉代码做二次开发。
对国内做具身智能的团队来说,需要重点关注两件事:
- IGX Thor 的供货和合规问题。这颗芯片走的是工业级 SKU,跟数据中心 GPU 不在一个出口管制层级,但实际能不能拿到、能不能用于本地化产品,需要走自己的供应链评估。
- 认证路径的本地化。Halos 实验室对接的是 TÜV 系欧洲认证机构,国内 CR、CCC 认证体系并不直接互认。想真正落地国内场景,还是要跟国内的安全认证标准做映射。
一点判断
英伟达过去两年在机器人和物理 AI 上的布局节奏明显加快——从 Isaac、GR00T、Cosmos 到今天的 Halos,它在做一件事:把自己变成具身智能时代的 "Intel Inside",但比 Intel 当年走得更深一层,要把安全和认证也圈进生态。
这件事对行业有两个直接影响。短期,会拉低一批想做工业人形机器人的初创团队的安全合规门槛,有助于加速从 Demo 到生产线的过渡。长期,机器人行业的格局会更像现在的自动驾驶——少数几家做底层平台和参考架构,大量公司做应用和场景。
至于英伟达能不能真的把这套架构推成事实标准,关键看接下来一年里除了 Agility,还能再签下多少家头部机器人厂商。Figure、Apptronik、1X、宇树这些公司怎么选边站,会是观察这件事走向的核心指标。
参考来源
- 业界首个全栈物理 AI 安全系统,英伟达 Halos for Robotics 正式发布 - IT之家 - IT之家关于本次发布的首发报道,包含完整产品组成和合作伙伴信息
- NVIDIA Halos 外部感知安全蓝图开源仓库 - GitHub - 英伟达官方 GitHub 组织,外部感知安全蓝图的早期访问代码托管位置


